Informatics Point
Информатика и проектирование
Построение функциональной электрической схемы блока управления
Сигналы, поступающие с датчиков, как правило, являются импульсными, то есть имеют малую продолжительность, а исполнительные устройства должны работать продолжительное время, поэтому сигналы датчиков необходимо преобразовывать с помощью запоминающих элементов, формирующих управляющие сигналы. Поэтому, для построения функциональной электрической схемы блока управления используем триггеры.
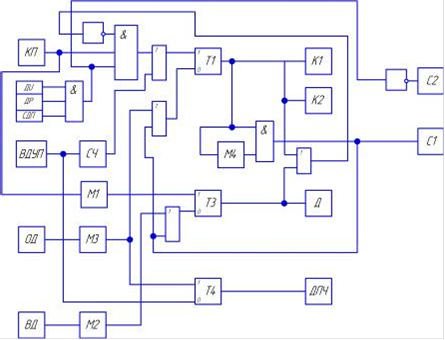
Рис. 2 Блок управления для сварки линейного шва (схема по фазам технологического цикла)
После команды "Пуск" при помощи датчиков ДU, ДP и CДП проверяется напряжение питания источника, давление в системе подачи углекислого газа и наличие электродной проволоки. При неисправности на выходе элемента & возникает логический "0" и с помощью инвертора и усилителя УС1 запускает сигнализацию С1. При отсутствии неисправностей логическая "1" с выхода &1 поступает на вход &2, на одном из входов которого реализована защита от повторного нажатия кнопки "Пуск". Далее сигнал поступает на триггер Т1 и включаются клапаны К1 и К2. Затем по истечении времени на счетчике М1 включается двигатель Д при помощи триггера Т3, при наличии неисправности включает сигнализация С2. При отсутствии неисправности после срабатывания датчика ВД производится отсчет времени на счетчике М2 и при помощи триггера Т3 отключается двигатель Д. После срабатывания датчика ОД производится отсчет времени на счетчике М3, по истечении которого подается сигнал на триггер Т1 и отключаются клапаны К1 и К2 и через триггер Т4 включается двигатель ДПИ и отключается после срабатывания датчик ДУП и подается сигнал на счетчик СЧ, после чего цикл запускается снова, пока значение на счетчике не будет равно двум.
. Построение алгоритма работы блока управления.
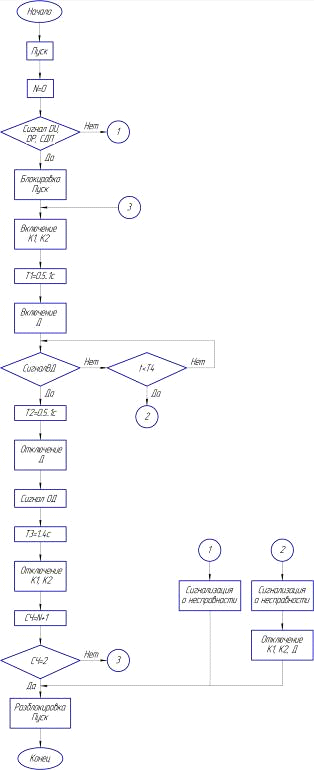
Рис. 3. Алгоритм работы блока управления
. Программа на языке FBD в среде CODESYS.
Переменные.
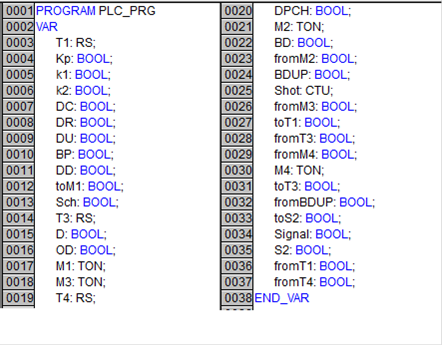
Рис. 4 Описание переменных.
Приведенные выше переменные описываются в блоке POU PLC_PRG и используются в качестве вспомогательных переменных. Входные и выходные переменные описываются в разделе глобальных переменных. Входные: Kp, OD, BD, BDUP. Выходные: k1, k2, D, DPCH. Все переменные в блоке глобальных переменных принадлежат к типу BOOL.
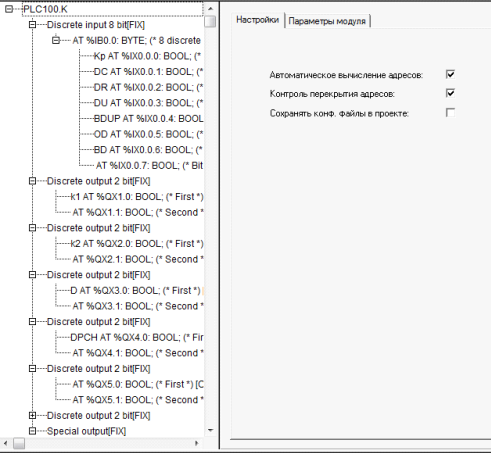
Рис. 5 Конфигурирование ПЛК.
PLC_PRG (PRG).
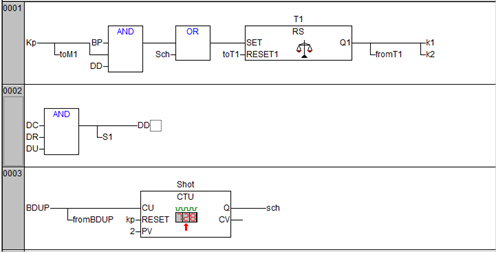
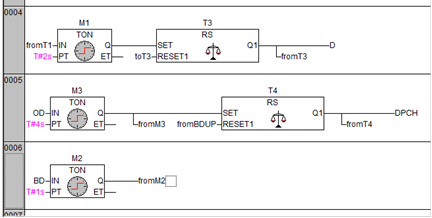
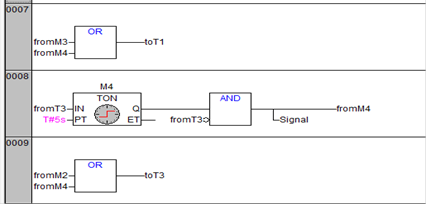
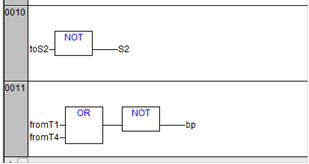
Рис. 6. Листинг программы на языке FBD.
В первой цепочке реализованы пуск программы, блокировка повторного нажатия и управления исполнительными клапанами К1 и К2 через триггер Т1. Во второй цепочке реализована проверка наличия неисправностей и сигнализация при их обнаружении. В третьей цепочке реализована работа счетчика. Далее в 4-й цепочке идет управление двигателем Д, через триггер Т3, управляющий сигнал поступает с таймер-счетчика М1. В 5-й цепочке реализовано управление двигателем ДПИ при помощи триггера Т4, управляющий сигнал приходит с датчика ОД на таймер счетчик М3 и далее на RS-триггер. В шестой цепочке сигнал с датчика ВД поступает на счетчик М2 и с него управляющий сигнал присваивается переменной FromM2. В остальных цепочках реализованы вспомогательные узлы и операции.
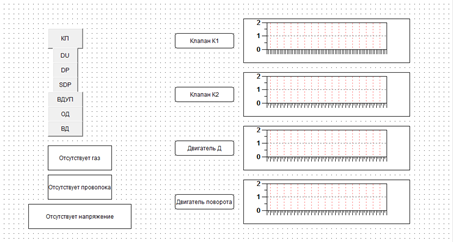
Рис. 7 Окно визуализации.
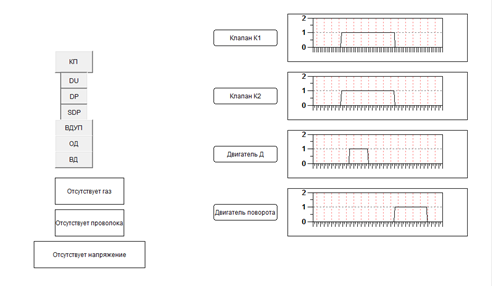
Рис. 8 Окно визуализации в режиме эмуляции.
Входит в standard. lib.
Переключатель с доминантой выключения:= RS (SET, RESET1) means:
Q1 = NOT RESET1 AND (Q1 OR SET)
Входные переменные SET и RESET1 - как и выходная переменная Q1 типа BOOL.
Пример объявления:: RS;
Пример IL:
CAL RSInst (SET: = VarBOOL1,RESET1: =VarBOOL2)RSInst. Q1VarBOOL3
Пример ST:(SET: = VarBOOL1, RESET1: =VarBOOL2);: = RSInst. Q1;
TON
Входит в standard. lib.
Функциональный блок 'таймер с задержкой включения'.(IN, PT, Q, ET) Входы IN и PT типов BOOL и TIME соответственно. Выходы Q и ET аналогично типов BOOL и TIME.
Пока IN равен FALSE, выход Q = FALSE, выход ET = 0. Как только IN становится TRUE, начинается отсчет времени (в миллисекундах) на выходе ET до значения, равного PT. Далее счетчик не увеличивается. Q равен TRUE, когда IN равен TRUE и ET равен PT, иначе FALSE. Таким образом, выход Q устанавливается с задержкой PT от фронта входа IN.
Лучшие статьи по информатике
Построение и анализ математической модели объекта управления
Построим математическую модель объекта управления в пространстве
состояния
Рисунок 2 Структурная схема ОУ
В схеме четыре элемента, запасающих э ...
Оптрон гальванической развязки
Основное преимущество обратноходовой топологии - дешевизна и
малое количество компонентов. Поэтому практически все сетевые источники питания
до мощностей 30 ...
Расчет приемника
- Диапазон принимаемых частот: ДВ, СВ
-
65,7 - 73,7 МГц
87,5 - 108,5 МГц
- Реальная чувствительность: Е=1,5 мкВ
- Выходная мощность: =40
мВт
- ...
Меню сайта
- Главная
- Проектирование современных устройств
- Разработка схем цифровых устройств
- Современные датчики положения
- Современные сетевые технологии
- Современные системы видеонаблюдения
- Телекоммуникационные системы в гостиницах
2025 © www.informaticspoint.ru